





ارسال سریع

ضمانت اصالت کالا

خدمات پس از فروش

فروش عمده

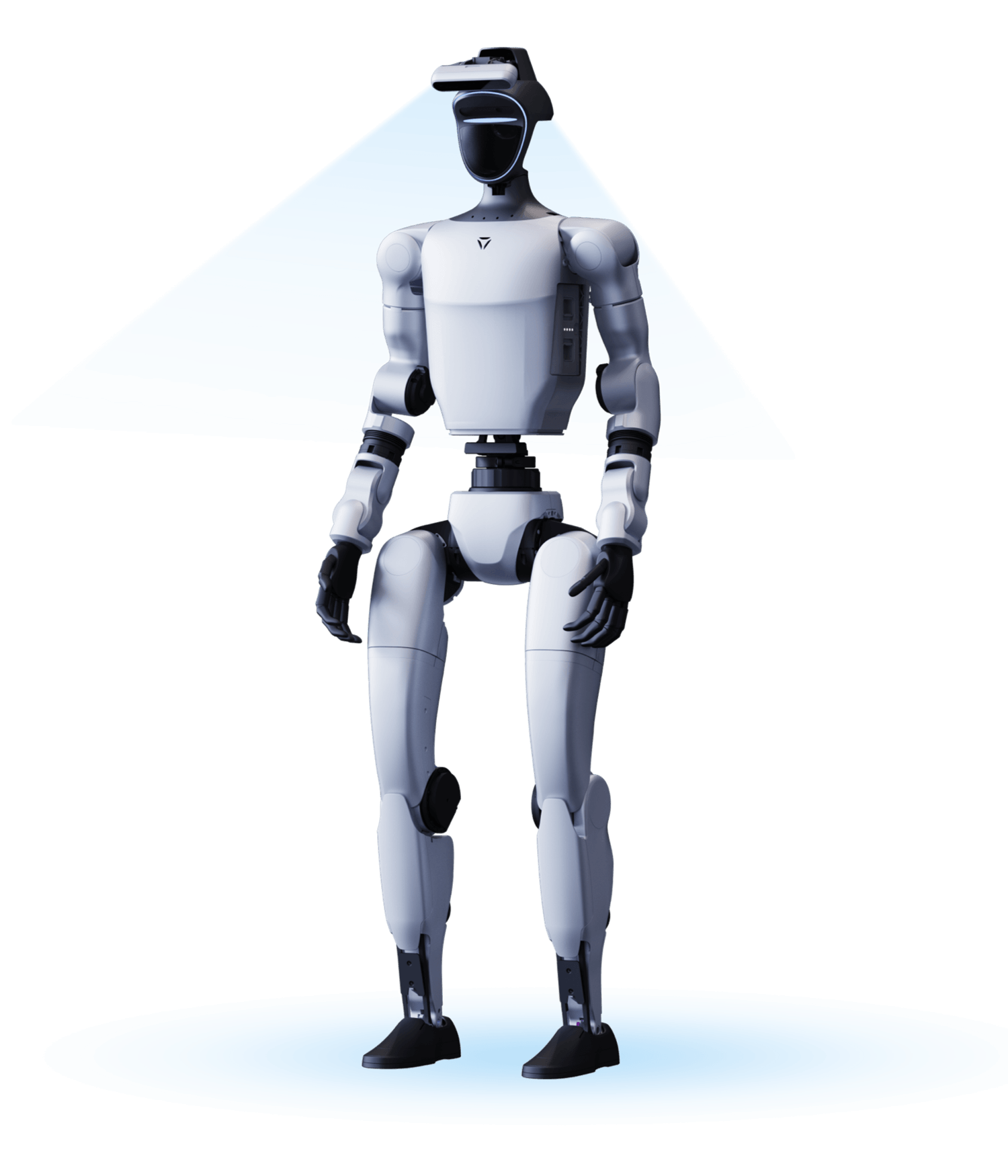
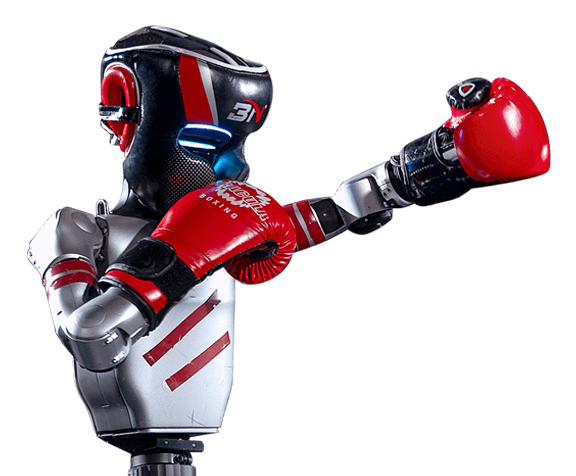
سبک و چابک، مسلط بر بازی
با گامهای استوار و سرعت چشمگیر، به راحتی در موقعیتهای تک به تک گلزنی میکند.

پایدار و مقاوم، بدون مزاحمت عوامل حواسپرتی
دارای سیستمهای کنترل حرکت پیشرو در صنعت، طراحی شده برای برتری در محیطهای رقابتی

چابکی و قدرت برتر
بر اساس الگوریتم شبکه Yolo 11، شناسایی سریع محیط ورزشگاه و موقعیتیابی دقیق حاصل میشود.


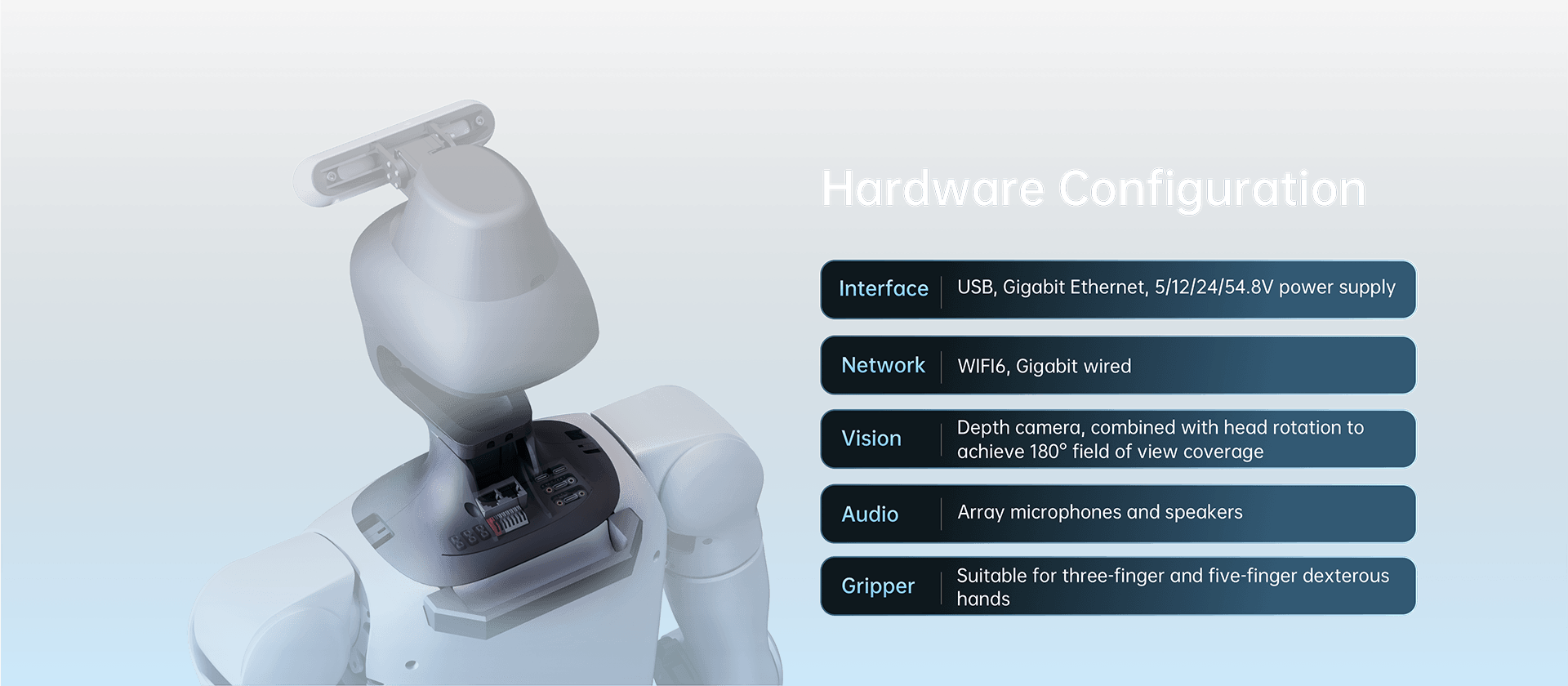
 رمزگذار دوگانه : دقیق و پایدار، بدون ترس از تداخل
رمزگذار دوگانه : دقیق و پایدار، بدون ترس از تداخل
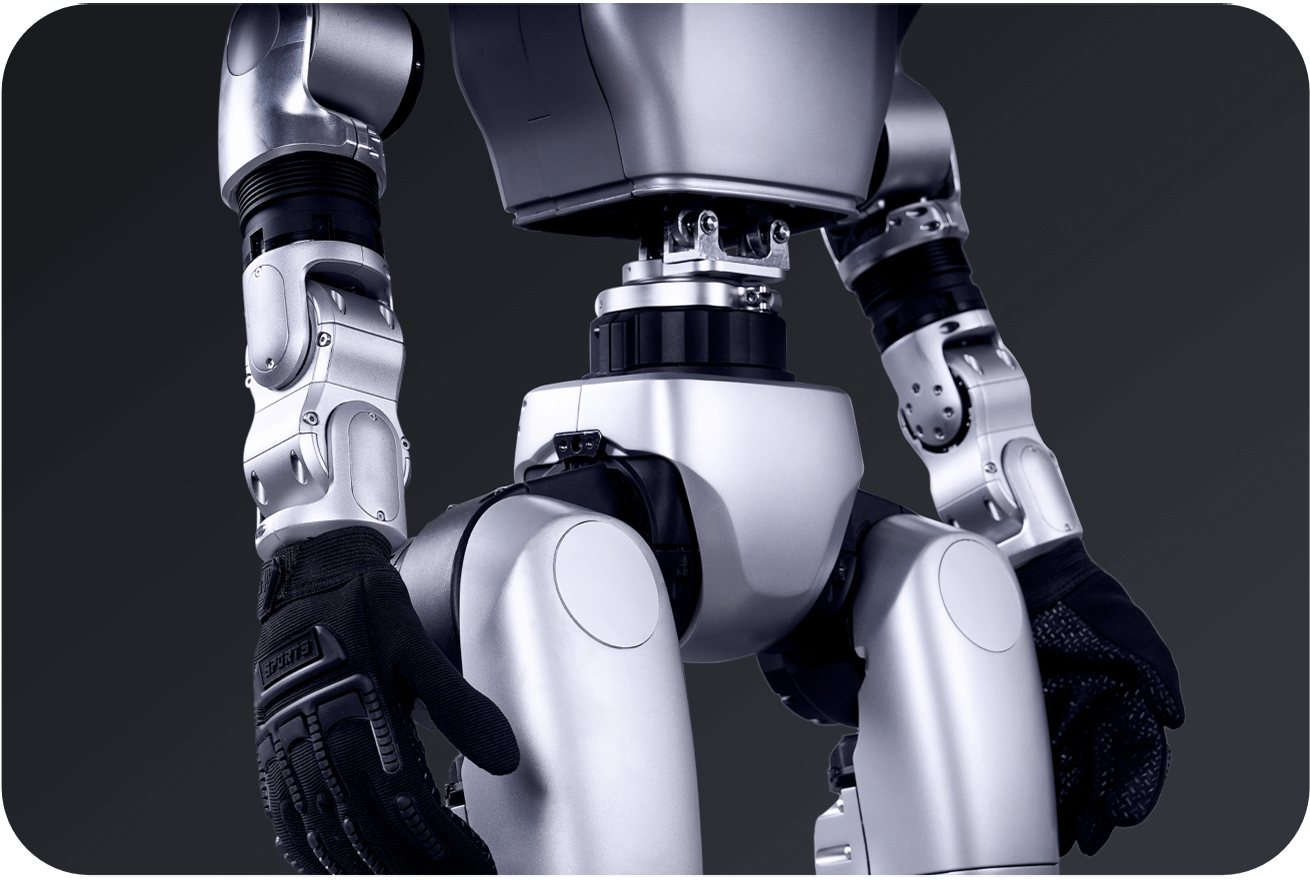
قوی و بادوام :پوسته با آلیاژ آلومینیوم/ پلاستیکهای مهندسی با مقاومت بالا پوشانده شده است
اندازه بدن : وزن حدود ۳۵ کیلوگرم / قد حدود ۱۳۰ سانتیمتر

عمر باتری : حدود ۲ ساعت، از تعویض سریع و شارژ سریع پشتیبانی میکند.


دیدگاهها
پاککردن فیلترهاهیچ دیدگاهی برای این محصول نوشته نشده است.